ホームページ
製品
AGIBOT YUANZHENGシリーズ
AGIBOT LINGXIシリーズ
AGIBOT Genie
AGIBOT JUECHENシリーズ
AGIBOTアクセサリー
AGIBOTセレクト
ドキュメントセンター
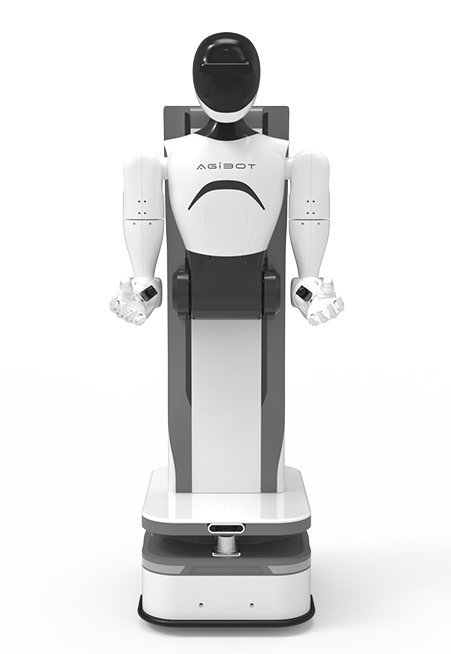
AGIBOT YUANZHENG A2-MAX
AGIBOT A2 Ultra
フルサイズヒューマノイドロボット
AGIBOT A2 Lite
演技マスター
AGIBOT A2-W
柔軟な製造ロボット
AGIBOT X1
フルスタックオープンソースロボット
AGIBOT X2 シリーズ
フルインテリジェント・フレキシブルロボット
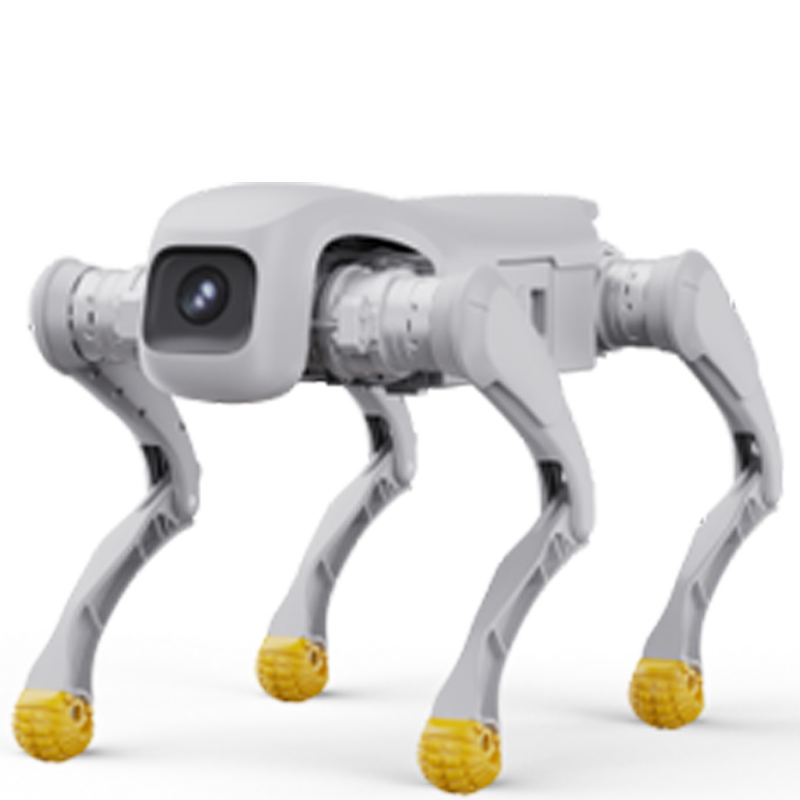
D1 Ultra
四足歩行スマートロボット
D1 Pro/Edu
万能な四足知能パイオニア
AGIBOT G2
汎用エンボディドAIロボット
AGIBOT-G1
汎用エンボディドAIロボット
エンボディドAI向けフルスタックデータ収集ソリューション
データサービス
AGIBOT C5
智元初の商業用清掃ロボット
OmniHand 2025
小型ボディ、多様な環境に適応
OmniHand pro 2025
強力な知覚、さらに多機能
AGIBOT A2 VR遠隔操作セット
AGIBOT A2 のみ使用可能)
夏澜
私たちについて
お問い合わせ
CN
EN
JP
Menu
ホームページ
製品
AGIBOT YUANZHENGシリーズ
A2 Ultra
A2 Lite
A2-W
商業用清掃ロボット
C5
AGIBOT LINGXIシリーズ
X1
X2
D1 Ultra
D1 Pro
AGIBOT Genie
G2
G1
AGIBOT JUECHENシリーズ
C5
AGIBOTアクセサリー
OmniHand 2025
OmniHand pro 2025
VR
AGIBOTセレクト
夏澜
ドキュメントセンター
私たちについて
お問い合わせ
JP
EN
CN